 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePEARL: Training Socratic Tutors with Pedagogically Aligned Reinforcement Learning
May 28, 2026Large Language Models (LLMs) have shown promise as educational tutors, yet effective tutoring requires more than solving problems: it must provide progressive Socratic guidance and balance multiple pedagogical objectives across multi-turn interactions. However, training such tutors remains challenging due to limited-fidelity and weakly controllable student simulation, under-specified pedagogical reward modeling, and unstable multi-objective optimization. To overcome these limitations, we propose PEARL, a pedagogically aligned reinforcement learning framework for training Socratic tutoring agents, consisting of three key components. First, we introduce a controllable student simulator that decouples latent cognitive states from response generation to model diverse abilities and misconceptions. Second, we develop a generative reward model that jointly evaluates pedagogical quality and objective correctness for policy optimization. Finally, we propose a stable multi-objective RL scheme that discretizes rewards within each dimension and aggregates normalized advantages across dimensions, preventing high-variance objectives from dominating updates. Experiments on multiple benchmarks show that PEARL achieves the best performance among open-source models and remains competitive with leading proprietary LLMs, despite using only a 30B policy model.
SPACENUM: Revisiting Spatial Numerical Understanding in VLMs
May 22, 2026Vision-Language Models (VLMs) are increasingly deployed in embodied environments, where they need produce numerical outputs such as action magnitudes and spatial coordinates. Although these numbers appear meaningful, it remains unclear whether these numerical outputs are genuinely grounded in spatial perception. Therefore, in this work, we revisit spatial numerical understanding through SpaceNum, a unified framework that captures two complementary settings: numbers as dynamic transitions during spatial exploration, and numbers as static layouts in spatial reasoning. We formulate two bidirectional tasks, Num2Space and Space2Num, to evaluate how well VLMs map between vision-side spatial structure and language-side numerical representations. We systematically study whether current VLMs truly understand numerical values in spatial settings. Across dynamic transitions and static layouts, we find that models largely fail to ground numbers in spatial meaning and often perform close to random guess. Through error analysis, reasoning trace analysis, and controlled interventions, we show that current VLMs rely heavily on shallow spatial cues, struggle to build stable coordinate-aware representations, and fail to abstract structured spatial layouts from visual observations. We further show that explicit reasoning provides only marginal gains, while tuning can partially improve spatial numerical understanding and transfer to external spatial reasoning benchmarks.
LABO: LLM-Accelerated Bayesian Optimization through Broad Exploration and Selective Experimentation
May 21, 2026The high cost and data scarcity in scientific exploration have motivated the use of large language models (LLMs) as knowledge-driven components in Bayesian optimization (BO). However, existing approaches typically embed LLMs directly into the sampling or surrogate modeling pipeline, without fully leveraging their significantly lower evaluation cost compared to real-world experiments. To address this limitation, we propose LLM-Accelerated Bayesian Optimization (LABO), a framework that combines LLM predictions with experimental observations within a single BO loop. LABO employs a gating criterion to dynamically balance the reliance on LLM predictions versus actual experiments. By leveraging inexpensive LLM evaluations to broadly explore the search space and reserving costly real experiments only for regions with high uncertainty, LABO achieves more sample-efficient optimization. We provide a theoretical analysis with a cumulative regret bound that formalizes this efficiency gain. Empirical results across diverse scientific tasks demonstrate that LABO consistently outperforms existing methods under identical experimental budgets. Our results suggest that LABO offers a practical and theoretically grounded approach for integrating LLMs into scientific discovery workflows.
Phys4D: Fine-Grained Physics-Consistent 4D Modeling from Video Diffusion
Mar 03, 2026Recent video diffusion models have achieved impressive capabilities as large-scale generative world models. However, these models often struggle with fine-grained physical consistency, exhibiting physically implausible dynamics over time. In this work, we present \textbf{Phys4D}, a pipeline for learning physics-consistent 4D world representations from video diffusion models. Phys4D adopts \textbf{a three-stage training paradigm} that progressively lifts appearance-driven video diffusion models into physics-consistent 4D world representations. We first bootstrap robust geometry and motion representations through large-scale pseudo-supervised pretraining, establishing a foundation for 4D scene modeling. We then perform physics-grounded supervised fine-tuning using simulation-generated data, enforcing temporally consistent 4D dynamics. Finally, we apply simulation-grounded reinforcement learning to correct residual physical violations that are difficult to capture through explicit supervision. To evaluate fine-grained physical consistency beyond appearance-based metrics, we introduce a set of \textbf{4D world consistency evaluation} that probe geometric coherence, motion stability, and long-horizon physical plausibility. Experimental results demonstrate that Phys4D substantially improves fine-grained spatiotemporal and physical consistency compared to appearance-driven baselines, while maintaining strong generative performance. Our project page is available at https://sensational-brioche-7657e7.netlify.app/
Proximal Action Replacement for Behavior Cloning Actor-Critic in Offline Reinforcement Learning
Feb 07, 2026Offline reinforcement learning (RL) optimizes policies from a previously collected static dataset and is an important branch of RL. A popular and promising approach is to regularize actor-critic methods with behavior cloning (BC), which yields realistic policies and mitigates bias from out-of-distribution actions, but can impose an often-overlooked performance ceiling: when dataset actions are suboptimal, indiscriminate imitation structurally prevents the actor from fully exploiting high-value regions suggested by the critic, especially in later training when imitation is already dominant. We formally analyzed this limitation by investigating convergence properties of BC-regularized actor-critic optimization and verified it on a controlled continuous bandit task. To break this ceiling, we propose proximal action replacement (PAR), a plug-and-play training sample replacer that progressively replaces low-value actions with high-value actions generated by a stable actor, broadening the action exploration space while reducing the impact of low-value data. PAR is compatible with multiple BC regularization paradigms. Extensive experiments across offline RL benchmarks show that PAR consistently improves performance and approaches state-of-the-art when combined with the basic TD3+BC.
PROGRESSLM: Towards Progress Reasoning in Vision-Language Models
Jan 21, 2026Estimating task progress requires reasoning over long-horizon dynamics rather than recognizing static visual content. While modern Vision-Language Models (VLMs) excel at describing what is visible, it remains unclear whether they can infer how far a task has progressed from partial observations. To this end, we introduce Progress-Bench, a benchmark for systematically evaluating progress reasoning in VLMs. Beyond benchmarking, we further explore a human-inspired two-stage progress reasoning paradigm through both training-free prompting and training-based approach based on curated dataset ProgressLM-45K. Experiments on 14 VLMs show that most models are not yet ready for task progress estimation, exhibiting sensitivity to demonstration modality and viewpoint changes, as well as poor handling of unanswerable cases. While training-free prompting that enforces structured progress reasoning yields limited and model-dependent gains, the training-based ProgressLM-3B achieves consistent improvements even at a small model scale, despite being trained on a task set fully disjoint from the evaluation tasks. Further analyses reveal characteristic error patterns and clarify when and why progress reasoning succeeds or fails.
Step Potential Advantage Estimation: Harnessing Intermediate Confidence and Correctness for Efficient Mathematical Reasoning
Jan 07, 2026Reinforcement Learning with Verifiable Rewards (RLVR) elicits long chain-of-thought reasoning in large language models (LLMs), but outcome-based rewards lead to coarse-grained advantage estimation. While existing approaches improve RLVR via token-level entropy or sequence-level length control, they lack a semantically grounded, step-level measure of reasoning progress. As a result, LLMs fail to distinguish necessary deduction from redundant verification: they may continue checking after reaching a correct solution and, in extreme cases, overturn a correct trajectory into an incorrect final answer. To remedy the lack of process supervision, we introduce a training-free probing mechanism that extracts intermediate confidence and correctness and combines them into a Step Potential signal that explicitly estimates the reasoning state at each step. Building on this signal, we propose Step Potential Advantage Estimation (SPAE), a fine-grained credit assignment method that amplifies potential gains, penalizes potential drops, and applies penalty after potential saturates to encourage timely termination. Experiments across multiple benchmarks show SPAE consistently improves accuracy while substantially reducing response length, outperforming strong RL baselines and recent efficient reasoning and token-level advantage estimation methods. The code is available at https://github.com/cii030/SPAE-RL.
Explore to Evolve: Scaling Evolved Aggregation Logic via Proactive Online Exploration for Deep Research Agents
Oct 16, 2025Deep research web agents not only retrieve information from diverse sources such as web environments, files, and multimodal inputs, but more importantly, they need to rigorously analyze and aggregate knowledge for insightful research. However, existing open-source deep research agents predominantly focus on enhancing information-seeking capabilities of web agents to locate specific information, while overlooking the essential need for information aggregation, which would limit their ability to support in-depth research. We propose an Explore to Evolve paradigm to scalably construct verifiable training data for web agents. Begins with proactive online exploration, an agent sources grounded information by exploring the real web. Using the collected evidence, the agent then self-evolves an aggregation program by selecting, composing, and refining operations from 12 high-level logical types to synthesize a verifiable QA pair. This evolution from high-level guidance to concrete operations allowed us to scalably produce WebAggregatorQA, a dataset of 10K samples across 50K websites and 11 domains. Based on an open-source agent framework, SmolAgents, we collect supervised fine-tuning trajectories to develop a series of foundation models, WebAggregator. WebAggregator-8B matches the performance of GPT-4.1, while the 32B variant surpasses GPT-4.1 by more than 10% on GAIA-text and closely approaches Claude-3.7-sonnet. Moreover, given the limited availability of benchmarks that evaluate web agents' information aggregation abilities, we construct a human-annotated evaluation split of WebAggregatorQA as a challenging test set. On this benchmark, Claude-3.7-sonnet only achieves 28%, and GPT-4.1 scores 25.8%. Even when agents manage to retrieve all references, they still struggle on WebAggregatorQA, highlighting the need to strengthen the information aggregation capabilities of web agent foundations.
AdvEvo-MARL: Shaping Internalized Safety through Adversarial Co-Evolution in Multi-Agent Reinforcement Learning
Oct 02, 2025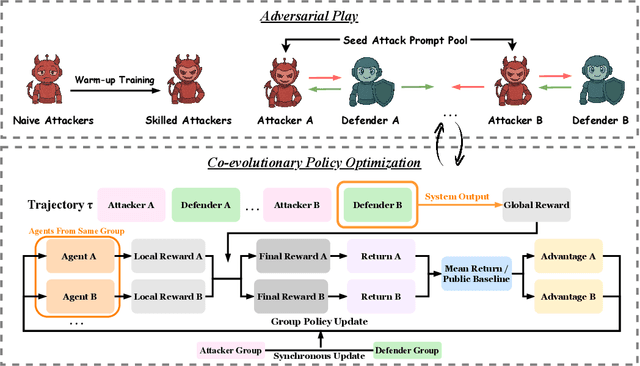

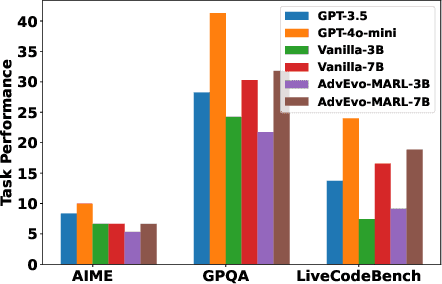
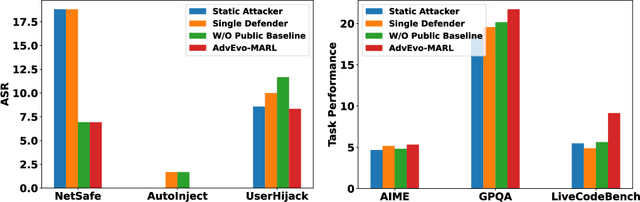
LLM-based multi-agent systems excel at planning, tool use, and role coordination, but their openness and interaction complexity also expose them to jailbreak, prompt-injection, and adversarial collaboration. Existing defenses fall into two lines: (i) self-verification that asks each agent to pre-filter unsafe instructions before execution, and (ii) external guard modules that police behaviors. The former often underperforms because a standalone agent lacks sufficient capacity to detect cross-agent unsafe chains and delegation-induced risks; the latter increases system overhead and creates a single-point-of-failure-once compromised, system-wide safety collapses, and adding more guards worsens cost and complexity. To solve these challenges, we propose AdvEvo-MARL, a co-evolutionary multi-agent reinforcement learning framework that internalizes safety into task agents. Rather than relying on external guards, AdvEvo-MARL jointly optimizes attackers (which synthesize evolving jailbreak prompts) and defenders (task agents trained to both accomplish their duties and resist attacks) in adversarial learning environments. To stabilize learning and foster cooperation, we introduce a public baseline for advantage estimation: agents within the same functional group share a group-level mean-return baseline, enabling lower-variance updates and stronger intra-group coordination. Across representative attack scenarios, AdvEvo-MARL consistently keeps attack-success rate (ASR) below 20%, whereas baselines reach up to 38.33%, while preserving-and sometimes improving-task accuracy (up to +3.67% on reasoning tasks). These results show that safety and utility can be jointly improved without relying on extra guard agents or added system overhead.
Evo-MARL: Co-Evolutionary Multi-Agent Reinforcement Learning for Internalized Safety
Aug 05, 2025


Multi-agent systems (MAS) built on multimodal large language models exhibit strong collaboration and performance. However, their growing openness and interaction complexity pose serious risks, notably jailbreak and adversarial attacks. Existing defenses typically rely on external guard modules, such as dedicated safety agents, to handle unsafe behaviors. Unfortunately, this paradigm faces two challenges: (1) standalone agents offer limited protection, and (2) their independence leads to single-point failure-if compromised, system-wide safety collapses. Naively increasing the number of guard agents further raises cost and complexity. To address these challenges, we propose Evo-MARL, a novel multi-agent reinforcement learning (MARL) framework that enables all task agents to jointly acquire defensive capabilities. Rather than relying on external safety modules, Evo-MARL trains each agent to simultaneously perform its primary function and resist adversarial threats, ensuring robustness without increasing system overhead or single-node failure. Furthermore, Evo-MARL integrates evolutionary search with parameter-sharing reinforcement learning to co-evolve attackers and defenders. This adversarial training paradigm internalizes safety mechanisms and continually enhances MAS performance under co-evolving threats. Experiments show that Evo-MARL reduces attack success rates by up to 22% while boosting accuracy by up to 5% on reasoning tasks-demonstrating that safety and utility can be jointly improved.